Морячёк
Старожил форума
За диссертацию пора тебе Юра садиться не угомонный ты мужик :ay:Заразил блин
не угомонный ты мужик :ay:Заразил блин
Короче , заехал я к авиа судо моделистам , пообщался на эту тему.
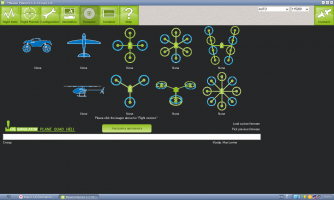
Ну опущу про :an:, вообщем та хрень которую ты хочешь в место "мозга автопилота" использовать , на корабле не пойдёть:bs: Вот посмотри тут интересное http://yandex.ru/clck/jsredir?from=...10n=ru&cts=1462947059027&mc=4.146740335896194
не угомонный ты мужик :ay:Заразил блин Короче , заехал я к авиа судо моделистам , пообщался на эту тему.
Ну опущу про :an:
, вообщем та хрень которую ты хочешь в место "мозга автопилота" использовать , на корабле не пойдёть:bs: Вот посмотри тут интересное http://yandex.ru/clck/jsredir?from=...10n=ru&cts=1462947059027&mc=4.146740335896194